Experience
Rome was not built in a day.
Robotic Platforms
Robots I have worked with.
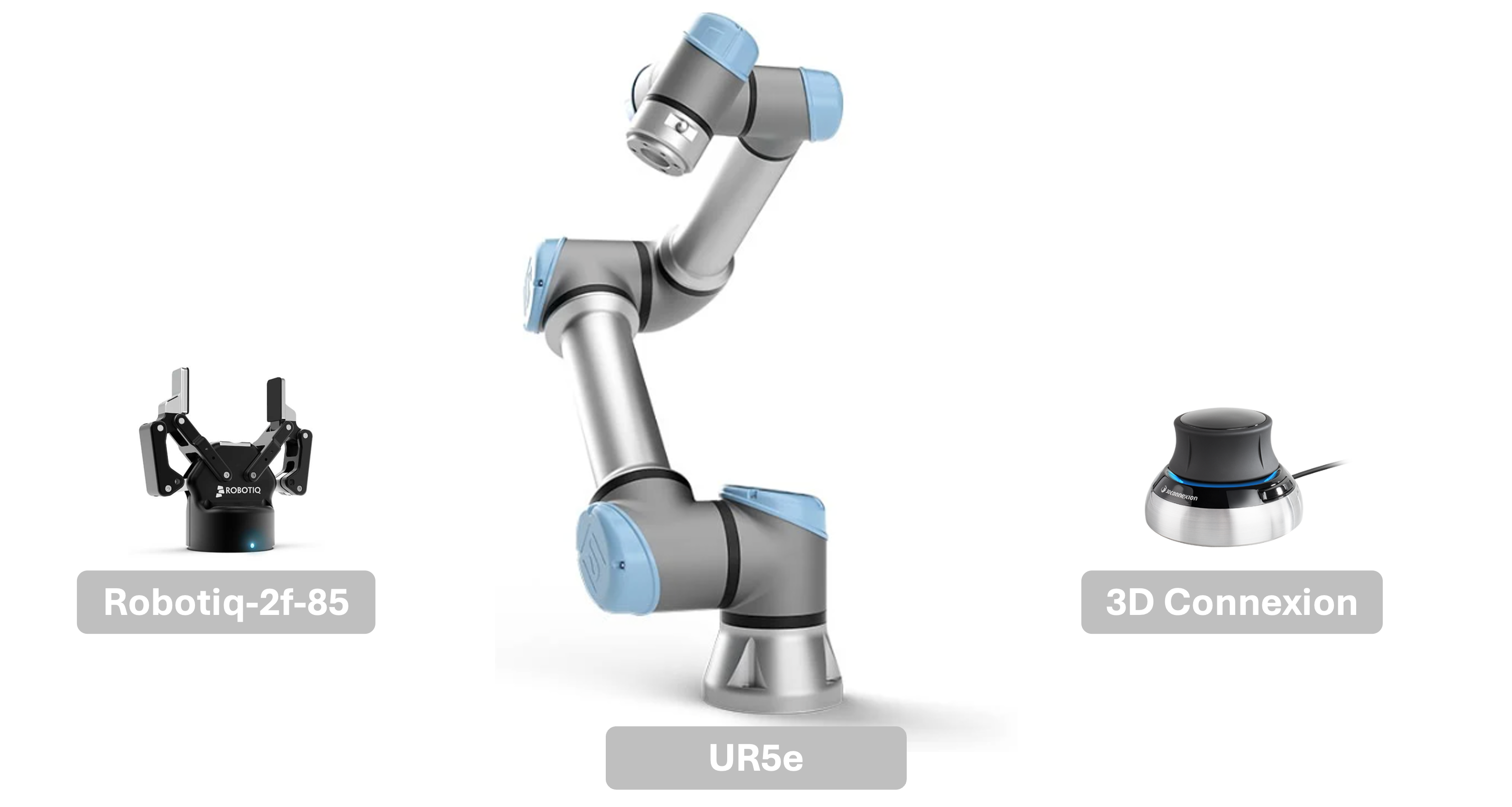
Configured UR5e, Robotiq-2f-85, 3D-Connexion from scratch and applied them to conduct research on manipulation.

Configured Franka Emika Panda, a 7-axis robot arm to conduct research on manipulation.

Configured Tiago++, a mobile robot with two 7-axis manipulators, to support research on mobile manipulation.
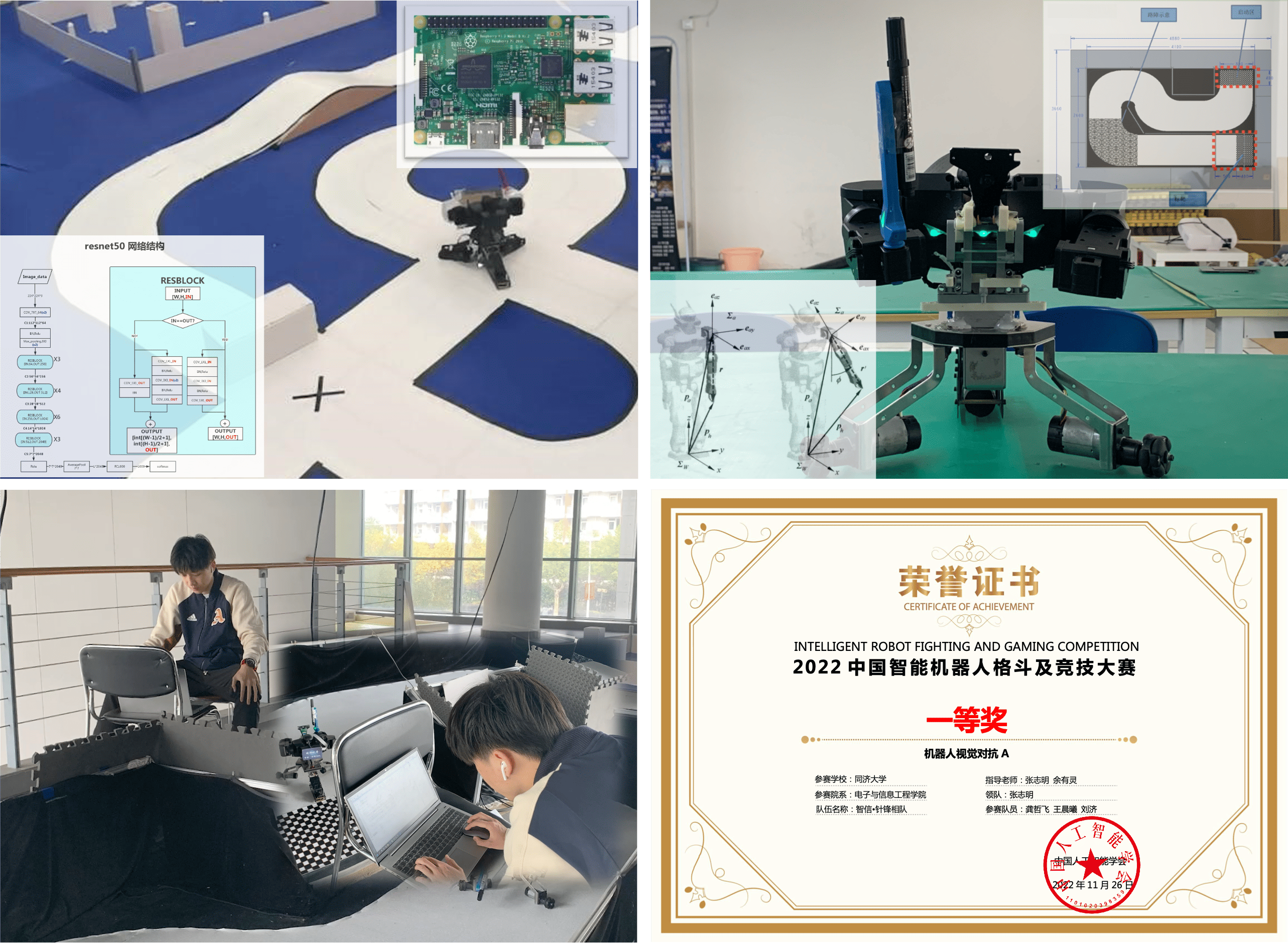
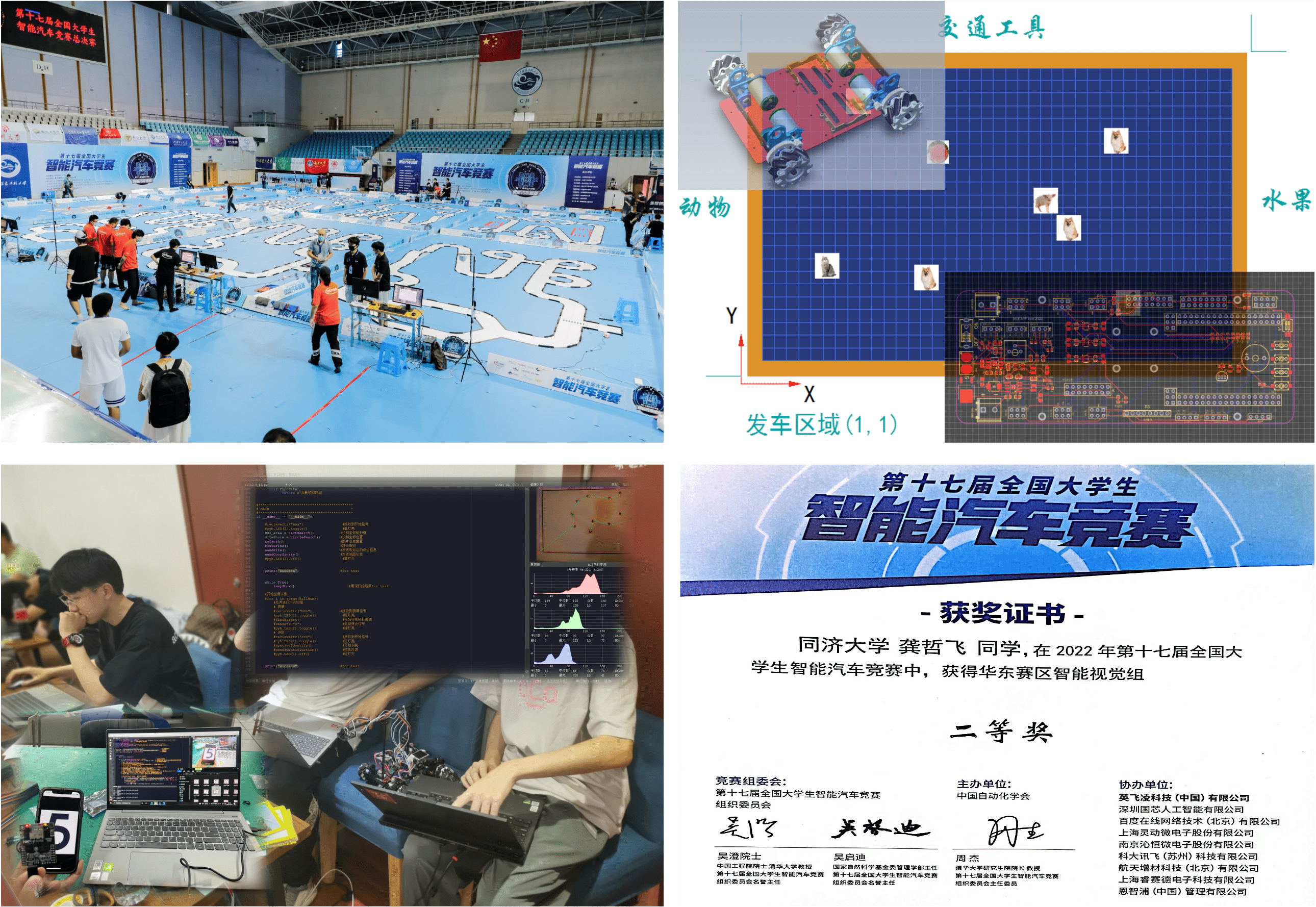
Competitions
⚝ National First Prize | Team Leader
2022.09 - 2022.11
⚝ East China Region Second Prize | Team Leader
2022.07 - 2022.09
Miscellaneous
I’m passionate about soccer ⚽️, photography 📸, and hiking ⛰️, and I’m always open to exploring new things. I’m an avid explorer and enjoy meeting people from diverse cultural backgrounds. I was born in Leshan 🇨🇳 and raised in Chongqing 🇨🇳, a vibrant city with a unique 8D cyberpunk vibe. I’ve also lived in Shanghai 🇨🇳, Lausanne 🇨🇭, Seoul 🇰🇷, and Hangzhou 🇨🇳 for over three months, and I’m currently based in Riverside, CA 🇺🇸.
Furthermore
Please check my CV (last updated in Feb. 2026) for a complete list of experience.
