Franka Panda

Configured Franka Panda and 3D-Connexion teleoperation from scratch while working at MiLab and applied them to conduct research on manipulation. You can find the repo here !
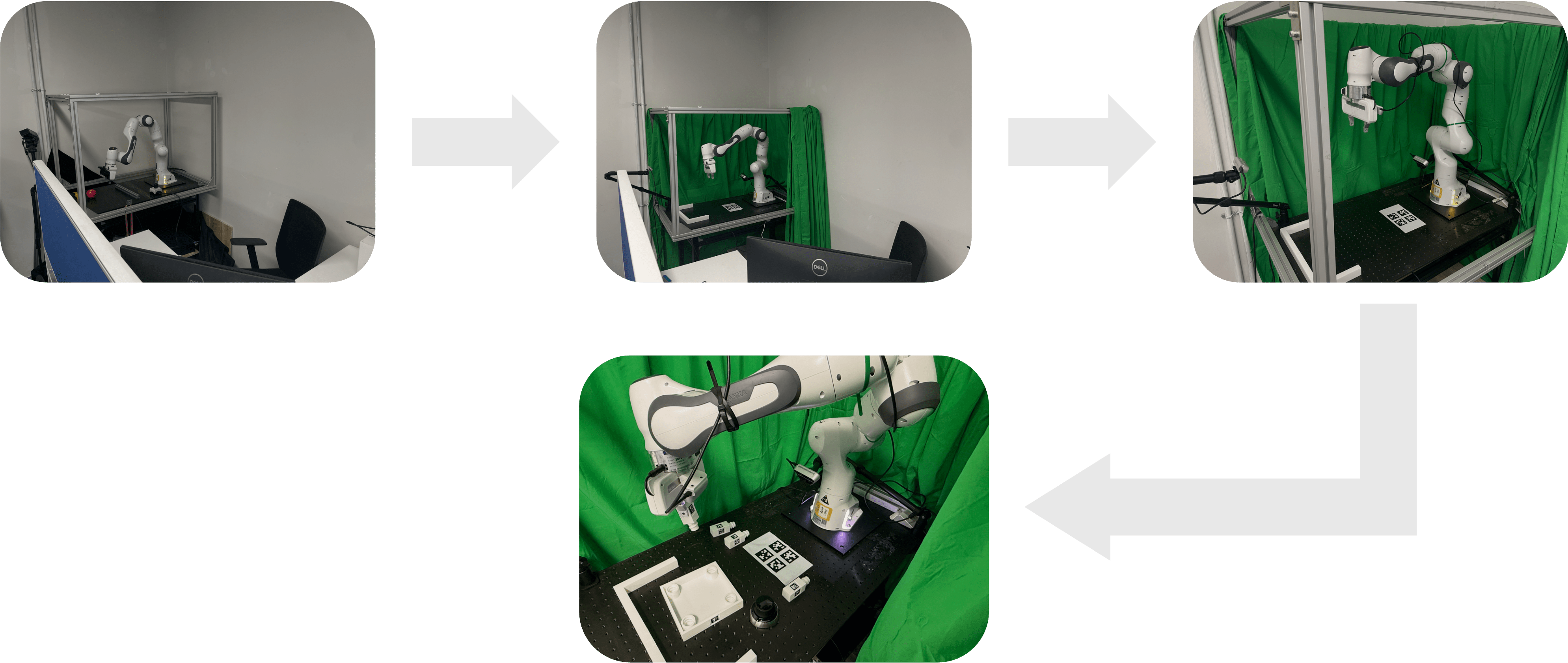 The construction process of the hardware platform.
The construction process of the hardware platform.
⚙️ Important Things
to Grab before Starting
🤔 Franka Control Interface (FCI)
Franka Control Interface is a real-time control framework provided by Franka Emika for the Panda robotic arm. It enables developers to achieve high-performance control by directly interfacing with the robot at a low level. -> manual
- High Frequency Control: Operates at up to 1 kHz, allowing precise control for advanced applications like force control and trajectory optimization.
- Low-level Access: Users can directly control joint positions, velocities, torques, or end-effector forces and poses.
- Real-time Feedback: Provides detailed robot states, such as joint positions, forces, external torques, and end-effector status.
- Customization: Through the
libfrankaC++ library, users can create their own control algorithms.
🤔 Difference between Franka and UR
| Feature | Franka FCI | UR RTDE |
|---|---|---|
| Real-time Capability | High (1 kHz) | Medium (2 ms update frequency) |
| Control Ability | Supports low-level control (joint force, velocity, position) | Supports joint or end-effector position and velocity control |
| State Feedback | High precision (joints, forces, end-effector states) | Customizable feedback, fairly comprehensive |
| Development Complexity | High (requires real-time kernel and low-level programming) | Lower (TCP/IP communication, standard system compatible) |
| Typical Applications | Force control tasks, advanced trajectory planning, research tasks | Industrial automation tasks, monitoring, and logging |
| Supported Languages | C++ (libfranka), third-party library extensions needed | Multi-language support (Python, C++, Java, etc.) |
| Hardware Requirements | Real-time kernel system, direct communication with the robot arm | Standard system, communicates with the robot via TCP/IP |
| Target Users | Researchers, advanced developers | Engineers, industrial automation developers |
🤔 Meanings of Different Colors
- White: Interactive
- Blue: Activated
- Cyan: Initiating motion
- Yellow: Locked
- Red: Error
- Pink: Conflict
- Green: Automatic execution
🤔 IP address connection
Connect the control panel through 192.168.3.20\desk (IP address of the robot arm). And we can control the panda through 192.168.3.20.
🤔 libfranka
A C++ library that provides low-level control of Franka Robotics research robots. Its source code is available at here. Documentation is available at here.
🤔 franka_ros
the ROS integration for Franka Robotics research robots, including support for ROS Control and MoveIt. It also contains franka_description, a collection of URDF models and 3D meshes that can be useful outside of ROS. The repository is available at here. Documentation is available at here. And the order is as following: $\text{PC} \Rightarrow \text{franka}_\text{ros} \Rightarrow \text{libfranka} \Rightarrow \text{Franka Control Interface(FCI)} \Rightarrow \text{Robot Arm}$
🤔 Frankapy
This is a software package used for controlling and learning skills on the Franka Emika Panda Research Robot Arm. And it’s based on libfranka and franka-interface, which is a C++ Library for Interfacing with libfranka and Frankapy. Installation Instructions and Network Configuration Instructions are also available here. And it’s provided from IAM Lab.
🤔 serl_franka_controllers
serl_franka_controllers is a ROS package designed to control Franka Emika Robot through libfranka and franka_ros. This package provides a compliant yet accurate Cartesian Impedance Controller for safe online reinforcement learning algorithms, as well as a Joint Position Controller for resetting arm. It’s provided from RAIL.
⚙️ Setting
basically we can control the robot through
libfrankaandfranka_rosfromFranka. while there exists a number ofthird-partysuites for off-the-shelf controllers likeserl_franka_controllersfrom here.
📒 Prerequisite
Ubuntu 20.04ROS Noeticlibfrankaandfranka_ros( both $\geq$ 0.8.0 )controllerschosen according to specific requirements
🛠️ Franka Installation
🔧 Install Noetic for Ubuntu 20.04
set download source
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
add ros-key
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
download noetic package
sudo apt update
sudo apt install ros-noetic-desktop-full
set global environment
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
install tools for ros
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall generator python3-wstool build-essential
check the installation
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
🔧 Install libfranka and franka_ros
build from the ROS repositories, and please refer to here to check the version-match between the franka system and the softwares’
sudo apt-get update
sudo apt-get install ros-noetic-libfranka ros-noetic-franka-ros
build from source
🔧 Build serl_franka_controllers
mkdir -p catkin_ws/src
cd catkin_ws/src
git clone git@github.com:rail-berkeley/serl_franka_controllers.git
cd catkin_ws
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3 --pkg serl_franka_controllers
cd ..
source catkin_ws/devel/setup.bash
🔧 Build virtual env
build miniforge if you don’t have it
cd /path/you/want/to/locate/
curl -L -O "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
source /path/to/your/miniforge3/bin/activate
build the corresponding environment
cd robot_infra
conda create -n robot_infra python=3.9
conda activate robot_infra
pip install -e .
check the path of each package in the env
python
import _package_to_test_
print(_package_to_test_.__file__)
🚗 Franka Run
- initialization
source /home/franka/jeffrey/miniforge3/bin/activate conda activate robot_infra cd /home/franka/jeffrey/Franka_Robot_Arm - run
source catkin_ws/devel/setup.bash python franka_ctrl/test.py --robot_ip=192.168.3.20 - close
killall -9 roscore killall -9 rosmaster
🛠️ Others Installation
🖱️ SpaceMouse
install the packages for SpaceMouse (3Dconnexion)
pip install numpy termcolor atomics scipy
pip install git+https://github.com/cheng-chi/spnav
sudo apt install libspnav-dev spacenavd
sudo systemctl start spacenavd
🍀 Ubuntu Install w/ real-time Kernel
🔧 Download Source
download the source from here
# build foler
mkdir franka_env
cd franka_env
# download corresponding packages
curl -SLO https://www.kernel.org/pub/linux/kernel/v5.x/linux-5.15.76.tar.gz
curl -SLO https://www.kernel.org/pub/linux/kernel/projects/rt/5.15/older/patch-5.15.76-rt53.patch.gz
# unzip
tar xvzf linux-5.15.76.tar.gz
gunzip patch-5.15.76-rt53.patch.gz
# extract source code and insert the patch
cd linux-5.15.76
patch -p1 < ../patch-5.15.76-rt53.patch
🔧 Build Source
build the kernel from now on (refer to here or here)
# download neccessary packages
sudo apt-get install build-essential bc curl ca-certificates gnupg2 libssl-dev lsb-release libelf-dev bison flex dwarves zstd libncurses-dev
# borrow the config setting from current kernel
make olddefconfig
update the config of current kernel
make menuconig
- General Setup -> Preemption Model -> Fully Preemptible Kernel (Real-Time)
- Cryptographic API -> Certificates for signature checking -> Provide system-wide ring of trusted keys -> Additional X.509 keys for default system keyring -> remove “debian/canonical-certs.pem” -> save to .config open .config for further update
gedit .config # change the following old commands CONFIG_SYSTEM_TRUSTED_KEYS="debian/canonical-certs.pem" CONFIG_SYSTEM_REVOCATION_KEYS="debian/canonical-revoked-certs.pem" CONFIG_DEBUG_INFO_BTF=y # to the following new commands CONFIG_SYSTEM_TRUSTED_KEYS="" CONFIG_SYSTEM_REVOCATION_KEYS="" CONFIG_DEBUG_INFO_BTF=n
begin to build kernel locally
fakeroot make -j24 deb-pkg
🔧 Install Source
finally, install the built kernel with patch
# install
sudo dpkg -i ../linux-headers-5.15.76-rt53*.deb ../linux-image-5.15.76-rt53*.deb
# re-start the computer
sudo reboot
# check
uname -msr
🔧 Add realtime permission
build a group for realtime command
sudo addgroup realtime
sudo usermod -a -G realtime $(whoami)
add the following limits into /etc/security/limits.conf, which is set for realtime group
@realtime soft rtprio 99
@realtime soft priority 99
@realtime soft memlock 102400
@realtime hard rtprio 99
@realtime hard priority 99
@realtime hard memlock 102400
finally, re-start your computer to apply it
reboot
⚙️ TroubleShooting
🔪 End-effector not initialized
- unclear problem -> it can be solved after several minutes
🔪 Pilot mode in /desk
Switching between desk control and end effector control
desk control: Control through the Desk interface using high-level actions or predefined tasks.end effector control: Direct control of the robot’s end-effector (the hand or gripper).
🔪 libfranka: Move command aborted by reflex!["communication_constraints_violation"] control_command_success_rate: 0,78
- the problem mainly comes from the communication delay between the PC and the franka, and you can check the following reasons: 1) overload PC (limited CPU recourses) 2) unsuitable network card 3) inactivated real-time kernel 3) network issues from cable
🔪 Robot error: joint limit reached
- the error comes from the abnormal recovery of franka arm, which is unknown about the reason, and what we can do is move the robot arm several times and wait a moment
